






[vc_row][vc_column][vc_tta_tabs][vc_tta_section title= »Fonctionnement du GPS / GNSS » tab_id= »1454345411442-6f83eaae-8971″][vc_column_text]La présente section donne un bref aperçu simplifié du GPS, un résumé des erreurs associées aux mesures, et les divers types de corrections différentielle.
GPS – Fonctionnement
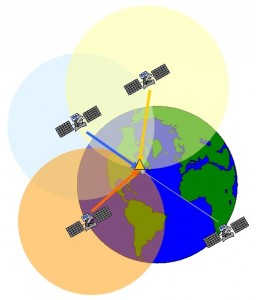
Le Department of Defence (DoD) des États-Unis exploite 24 heures par jour un système de positionnement global (Global Positioning System ou GPS) fiable à toutes températures. NAVSTAR (NAVigation Satellite Time And Ranging), le nom original de cet outil de positionnement et de navigation géographique, comprend une constellation officielle de 24 satellites (plus quelques-uns en réserve active) en orbite autour de la terre à une altitude d’environ 22 000 km.
Principe de base
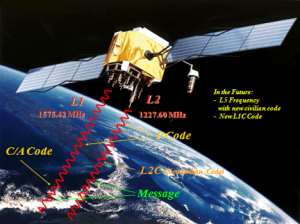
 Ces satellites transmettent divers renseignements codés aux utilisateurs de GPS sur différentes fréquences UHF (par exemple, Code C/A sur L1 à 1575.42 MHz).
Ces satellites transmettent divers renseignements codés aux utilisateurs de GPS sur différentes fréquences UHF (par exemple, Code C/A sur L1 à 1575.42 MHz).
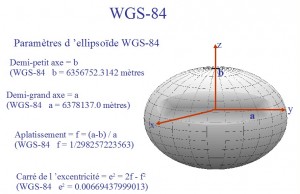
Ces renseignements permettent à l’équipement d’un utilisateur de calculer la portée vers chaque satellite. Le GPS est essentiellement un système de chronométrage – les portées sont calculées en minutant le temps nécessaire à un signal GPS codé pour atteindre l’antenne GPS de l’utilisateur. Pour calculer une position géographique, le récepteur GPS se sert d’un algorithme complexe incorporant les coordonnées des satellites et la portée vers chaque satellite. La réception de quatre ou plus de ces signaux permet au récepteur GPS de calculer les coordonnées en 3 dimensions. La poursuite de seulement trois satellites réduit le positionnement à des coordonnées en deux dimensions (horizontale et verticale fixe). Le récepteur GPS calcule sa position par rapport à une phase centrale de l’antenne GPS. La latitude, la longitude et l’altitude de l’antenne sont mesurées conformément à la plus récente révision (G-1150) de l’ellipsoïde du Système géodésique mondial 1984 (WGS 84). (Il est à noter que la révision actuelle G-1150 diffère de la mise en place originale du datum WGS 84. Voir « À propos du Datum » dans le menu « Comprendre le SBAS »).
Services GPS
La précision de la position présentée par le GPS dépend du type de service et de l’équipement disponible. Pour des raisons de sécurité, il existe deux services GPS : le service de positionnement standard (SPS) et le service de positionnement précis (SPP). Le SPS utilise un code modulé dans le signal de mesure connu sous le nom de Code C/A. Le Department of Defence (DoD) des États-Unis réserve le SPP à l’utilisation de son personnel et de partenaires autorisés. Le SPP utilise un code différent de celui du SPS, connu sous le nom de Code P, dont la résolution est supérieure au Code C/A. Le DoD fournit le SPS gratuitement partout dans le monde, à tous les utilisateurs civils.
Actuellement, un récepteur GPS autonome peut atteindre une précision d’environ 10 à 15 mètres, en fonction de la sophistication du moteur GPS. Pour plusieurs applications de positionnement et de navigation, ce niveau de précision est insuffisant, et des techniques différentielles doivent être utilisées.
 Sources d’erreur et nécessité de correction différentielle
Sources d’erreur et nécessité de correction différentielle
Il existe diverses sources d’erreurs qui affectent la précision des récepteurs GPS, et différentes méthodes de compensation de ces erreurs.
Sources d’erreur
Dans le passé et afin de conserver un avantage stratégique, le DoD des États-Unis dégradait artificiellement la performance du SPS de sorte que la précision du positionnement se limitait à 100 mètres dans 95 % des cas. Cette dégradation intentionnelle était appelée SA (disponibilité sélective). L’effet de la SA a été réduit à zéro depuis le milieu de l’année 2000, et s’est officiellement « éteint » (définitivement) en 2007.
Les principales sources d’erreurs qui dégradent maintenant la performance du GPS comprennent les erreurs atmosphériques, la géométrie des satellites, les trajets multiples, le repérage de temps et les erreurs orbitales des satellites.
• Erreurs atmosphériques :
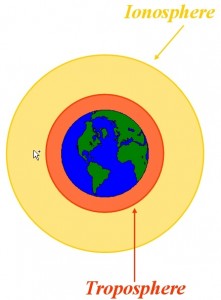
Les erreurs atmosphériques sont les sources d’erreurs les plus fréquentes pour le GPS. Comme les satellites sont en orbite à environ 20 000 km autour de la terre, les signaux GPS doivent traverser les couches de l’ionosphère et de la troposphère avant d’atteindre l’antenne réceptrice. L’ionosphère est un terme collectif identifiant diverses couches de particules ionisées et d’électrons se trouvant à des altitudes de 80 à 250 km dans l’atmosphère. L’ionisation est surtout causée par les courtes longueurs d’ondes du rayonnement solaire (rayons X et ultraviolets) au cours de la journée. Les activités ionosphériques ont le plus fort impact sur la précision du GPS.
La correction différentielle compense grandement les erreurs atmosphériques.
• Géométrie des satellites :
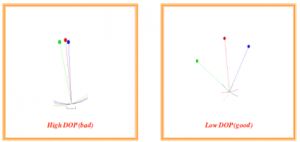
Comme le récepteur utilise une triangulation des signaux GPS pour déterminer son positionnement sur la terre, plus la géométrie des satellites dans le ciel est précise, plus la triangulation qui en résulte est précise.
L’effet de la géométrie des satellites sur les erreurs de positionnement est appelé DOP (pour Dilution of Precision ou affaiblissement de la précision). Le récepteur GPS calcule constamment la valeur DOP en fonction des satellites actuellement utilisés afin d’établir sa localisation. Meilleure est la géométrie (satellites bien répartis dans le ciel), plus faible est la valeur DOP. Si tous les satellites sont dans le même secteur du ciel ou s’ils sont obstrués par des immeubles, des montagnes, etc., la géométrie sera pauvre et la valeur DOP calculée sera élevée.
Les valeurs HDOP, VDOP, PDOP, TDOP et GDOP sont respectivement l’affaiblissement de la précision Horizontale, Verticale, Position (3D), Temps et Géométrique.
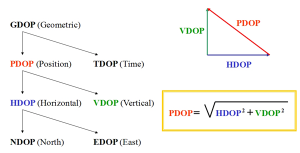
Aucune indication fixe n’établit ce qu’est une « bonne » ou une « mauvaise » valeur DOP. Sachant que la valeur DOP idéale est 1, chaque application nécessite une précision différente et permet des valeurs DOP plus élevées. Habituellement, 1 à 2 est excellent, 3 à 4 est bon, 5 à 7 est acceptable et 8 ou plus est pauvre. Cependant les entreprises forestières qui ne requièrent qu’une précision d’environ 5 m et recherchent une productivité accrue accepteront un PDOP aussi élevé que 8 à 12. La correction différentielle ne compense pas pour les erreurs de valeur DOP. La valeur DOP étant calculée par le récepteur, la plupart des logiciels GPS offrent des filtres empêchant l’opération ou l’enregistrement lorsque la valeur DOP atteint un seuil prédéterminé.
• Trajets multiples :
Il s’agit d’un phénomène de propagation qui fait que les signaux radio atteignent l’antenne par deux ou plusieurs trajets. Les causes de ces trajets multiples comprennent la canalisation atmosphérique, la réflexion et réfraction ionosphérique, et la réflexion d’une nappe d’eau, de montagnes, d’arbres ou d’édifices.
La correction différentielle ne compense pas pour les erreurs causées par les trajets multiples. Certaines précautions peuvent atténuer la sensibilité de l’antenne GPS à ces reflets de signaux, par exemple en s’éloignant des structures réfléchissantes comme les immeubles. Un combiné récepteur/antenne haut de gamme pourra mieux rejeter les trajets multiples, alors qu’un dispositif moins dispendieux tolérera un plus grand nombre de trajets multiples.
• Erreurs de chronométrage et d’orbite des satellites :
Les satellites GPS comportent des horloges atomiques très précises et suivent des orbites déterminées. Mais des dérives sont inévitables à la fois dans l’horloge et dans l’orbite, et même une très faible dérive peut causer des erreurs dans le récepteur sur terre. Bien que l’horloge et l’orbite ne puissent être ajustées, le déport est calculé par la composante terrestre du GPS et renvoyé aux satellites. Les satellites émettent alors les données d’horloge et des éphémérides à l’utilisateur.
Il peut y avoir un délai entre le moment où déport se produit, et le moment où il est calculé et émis.
Selon la correction différentielle utilisée (locale ou globale), les effets des erreurs d’orbite et de chronométrage peuvent être largement compensés.
Qu’est-ce qu’une correction différentielle locale ? (LBAS)
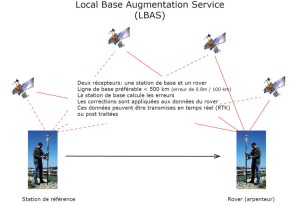
Le GPS différentiel local, le DGPS le plus courant, est essentiellement un processus de différentiation qui supprime les sources d’erreurs de positionnement du GPS et améliore son intégrité. Ce type de correction différentielle est souvent appelé système d’augmentation local (LBAS – Local Based Augmentation System), les corrections étant calculées à partir d’une station de référence (où l’antenne est installée à un point connu) et appliquées au GPS mobile soit en temps réel ou dans un logiciel de post-traitement. Il existe plusieurs méthodes de correction différentielle locale :
• Correction différentielle conventionnelle en temps réel :
Il s’agit de la façon la plus courante de corriger les erreurs de GPS en temps réel, les corrections étant envoyées par la station de référence au GPS mobile par le biais d’un équipement de communication. La correction différentielle conventionnelle en temps réel utilise les mesures de la portée du code C/A et les connexions connexes. Les corrections de la phase porteuse ne sont pas utilisées avec ce type de technique différentielle.
• Post-traitement :
Cette méthode est souvent utilisée lorsqu’une précision plus élevée que celle offerte par la correction différentielle conventionnelle est nécessaire, ou une forme conventionnelle de correction en temps réel n’est pas disponible dans la région où le GPS mobile est utilisé. En fonction du récepteur physique et de la méthodologie utilisée pour le post-traitement, la précision atteinte peut jouer de quelques centimètres à quelques millimètres. Un éventail de progiciels de tiers fournisseurs sont disponibles pour le post-traitement des mesures brutes du GPS.
• RTK – cinématique en temps réel :
Cette méthode utilise des techniques plus sophistiquées pour résoudre le nombre de longueurs d’ondes entre le satellite et l’utilisateur, afin de fournir un positionnement centimétrique (ou inférieur) en temps réel. Pour cette technique il faut un récepteur et des antennes haut de gamme, ainsi qu’un logiciel d’exploitation interne pour calculer des positionnements précis.
Qu’est-ce qu’un système d’augmentation spatial (SBAS) ?
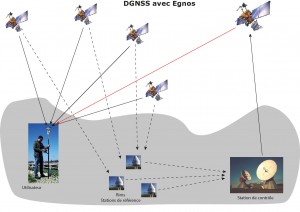
Le SBAS est un type de correction différentielle plus récent et différent. Il incorpore une architecture modulaire, semblable à celle du GPS, incluant une composante terrestre, une composante spatiale et une composante utilisateur :
La composante terrestre comprend les stations de référence, les centres de traitement, un réseau de communication et une station terrestre de navigation (NLES – Navigation Land Earth Station).
La composante spatiale comprend les satellites géostationnaires (par exemple, EGNOS utilise actuellement des transpondeurs Inmarsat).
La composante utilisateur comprend l’équipement de l’utilisateur, notamment un récepteur GPS SXBlue II et une antenne. Dans un SBAS, une correction distincte est disponible pour chaque source d’erreur plutôt que pour l’effet total sur la portée de mesure de l’équipement de l’utilisateur. Il en résulte une performance du système plus constante, peu importe l’emplacement géographique par rapport aux stations de référence. Plus particulièrement, le SBAS calcule les erreurs distinctes suivantes :
• Erreur ionosphérique
• Erreurs de chronométrage du GPS
• Erreurs d’orbite des satellites GPS[/vc_column_text][/vc_tta_section][vc_tta_section title= »SBAS / LBAS » tab_id= »1454345411468-62d6114b-0b6b »][vc_column_text]Pour comprendre le fonctionnement d’un système d’augmentation spatial (SBAS) comme WAAS/EGNOS/MSAS/GAGAN, nous vous présentons d’abord la méthode conventionnelle de correction différentielle en temps réel, ainsi que les facteurs affectant la précision d’un DGPS local. (À noter que cette section ne traite pas de la correction différentielle de la phase porteuse).
 Système d’augmentation local (LBAS)
Système d’augmentation local (LBAS)
Un DGPS conventionnel implique l’installation d’un récepteur GPS de référence dont l’antenne est placée en un point dont les coordonnées sont connues. Ce récepteur effectue les mesures de distance, en temps réel, vers chacun des satellites GPS. La portée mesurée comprend les erreurs présentes dans le système. Le récepteur de la station de référence calcule la véritable portée, sans les erreurs, connaissant ses propres coordonnées et celles de chaque satellite. La différence entre la portée connue et la portée mesurée de chaque satellite représente l’erreur de portée. Cette erreur est le nombre qui doit être soustrait de la mesure de la distance de chaque satellite afin de corriger les erreurs présentes dans le système. La station de référence transmet les corrections à l’erreur de portée aux récepteurs distants en temps réel.Le récepteur distant corrige ses mesures de portée des satellites à l’aide de ces corrections différentielles, ce qui résulte en un positionnement beaucoup plus précis. Il s’agit là de la stratégie prédominante du DGPS utilisée dans la majorité d’applications en temps réel. Un positionnement qui utilise les corrections générées par un radiophare, par exemple, donnera une précision horizontale de 1 mètre à 5 mètres avec 95 % de fiabilité selon la qualité du récepteur GPS utilisé. Selon le même principe, les systèmes DGPS de courte portée plus sophistiqués (10 à 15 km) peuvent atteindre une précision centimétrique à l’aide d’une phase porteuse. Nous parlons dans ce cas d’un système RTK plutôt qu’un DGPS.
Système d’augmentation spatial (SBAS)
La Federal Aviation Administration des États-Unis a élaboré un système d’augmentation étendu (WAAS – Wide Area Augmentation System) dans le but d’assurer un positionnement très précis à l’industrie de l’aviation. En plus de fournir un service de haute qualité et de précision à cette industrie, ce système est disponible gratuitement à tous les utilisateurs et marchés civils en Amérique du Nord et en Amérique Centrale. Ce service fait partie de la grande catégorie des systèmes d’augmentation spatiaux (SBAS).
Après un essai réussi de 21 jours le 24 août 2000, la Federal Aviation Administration américaine annonçait que son système d’augmentation étendu (WAAS) serait dorénavant en opération 24 heures par jour, sept jours par semaine. Les essais ont démontré que ce signal est précis et fiable. Depuis sa mise en service le 10 juillet 2003, le WAAS a subi quelques modifications à sa constellation et à sa couverture de satellites (PRN 122 et 134 remplacés par PRN 135 et 138 à de nouveaux emplacements; et par l’ajout de stations de surveillance terrestres au Canada et au Mexique en septembre 2007).
D’autres agences gouvernementales ont suivi cet exemple et ont développé des SBAS compatibles pour leurs régions géographiques respectives. En Europe, l’Agence spatiale européenne, la Commission européenne et l’Organisation EUROCONTROL ont développé ensemble le Complément géostationnaire européen de navigation (EGNOS). EGNOS est désormais entièrement déployé et se trouve en phase pré-opérationnelle. Le système doit être certifié sécuritaire pour la sauvegarde de vies humaines avant d’être entièrement opérationnel. De plus, le 28 juin 2007, l’Agence spatiale européenne et l’Agence pour la sécurité de navigation aérienne en Afrique et à Madagascar ont signé une entente de collaboration ayant pour but l’utilisation de la navigation par satellite pour améliorer la sécurité du trafic aérien au-dessus du continent africain.
Au Japon, le Satellite multifonctionnel des transports (MSAS – Satellite-based Augmentation System) a été déployé par le Bureau d’aviation civile du Japon. Les lancements réussis des satellites MTSAT-1R et MTSAT-2 ont été suivis par l’intégration du système pour le MSAS terrestre et les MTSAT, par l’envoi de signaux d’essai à partir des MTSAT. Le but de la transmission des signaux d’essai visait à optimiser la performance du système et à vérifier que les renseignements d’augmentation respectent les exigences de sécurité et de performance. Comme ces essais ont réussi, le MSAS a été mis en service pour utilisation par l’aviation le 27 septembre 2007.
En Inde, la Indian Space Research Organisation (ISRO) et les Autorités aéroportuaires indiennes ont complété avec succès l’essai final d’acceptation du GPS Aided GEO Augmented Navigation system (GAGAN) tel qu’annoncé le 20 novembre 2007 par la Raytheon Company. Ce test d’acceptation final étant complété, l’Inde se dirige maintenant vers la phase suivante du programme, qui étendra le réseau terrestre existant, ajoutera une redondance, et produira l’analyse et la documentation de certification pour la mise en service de la sécurité aérienne. Le satellite Inmarsat 4f1 a été utilisé pour l’essai d’acceptation du système. Dans l’attente du lancement de son propre satellite de communication, le GSAT-4 (prévu pour juin 2009), le ISRO indien a cessé l’émission des signaux d’essai GAGAN.
La Chine a un programme semblable pour un SBAS, le service portant le nom de Chinese Satellite Navigation Augmentation System (SNAS).
Notre gamme peut recevoir les données de correction de tous les SBAS compatibles.
Fonctionnement
Le SBAS incorpore une architecture modulaire, semblable à celle du GPS, incluant une composante terrestre, une composante spatiale et une composante utilisateur :
La composante terrestre comprend les stations de référence, les centres de traitement, un réseau de communication et une station terrestre de navigation (NLES – Navigation Land Earth Station).
La composante spatiale comprend les satellites géostationnaires (par exemple, EGNOS utilise des transpondeurs Inmarsat).
La composante utilisateur comprend l’équipement de l’utilisateur, par exemple un récepteur GNSS Arrow et une antenne.
L’architecture logicielle du SBAS se base sur l’état. Cela signifie qu’une correction distincte est disponible pour chaque source d’erreur plutôt que pour l’effet total sur la portée de mesure de l’équipement de l’utilisateur. Ceci permet de gérer plus efficacement les problèmes de décorrélation spatiale qu’avec certaines autres techniques, résultant en une performance plus stable du système peu importe l’emplacement géographique par rapport aux stations de référence. Plus particulièrement, le SBAS calcule les erreurs distinctes suivantes :
Erreur ionosphérique
Erreurs de chronométrage du GPS
Erreurs d’orbite des satellites GPS
Les figures ci-dessous montrent les segments terrestres des systèmes WAAS, EGNOS et MSAS, respectivement. En 2007, treize stations de surveillance ont été ajoutées au réseau WAAS existant, augmentant ainsi la couverture ionosphérique de la constellation SBAS. Les emplacements sont indiqués en rouge : 4 en Alaska, 4 au Canada et 5 au Mexique. Segment terrestre WAAS Segment terrestre EGNOSSegment terrestre MSAS (fin 2007)

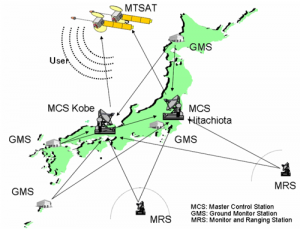

Segment terrestre MSAS
Pourvu que le réseau de stations de référence SBAS puisse poursuivre un satellite GPS, les corrections d’orbite et de chronométrage seront fournies à ce satellite. Les corrections ionosphériques pour ce satellite ne sont disponibles que si le signal traverse la carte ionosphérique fournie par le SBAS (par exemple la carte ionosphérique WAAS couvre toute la région de l’Amérique du Nord et de l’Amérique Centrale). Par exemple, si un satellite se trouve au sud de votre position actuelle à une faible élévation, le point de percée de l’ionosphère se situera beaucoup plus au sud de votre position puisque l’ionosphère est à une altitude d’environ 60 km. Il doit y avoir une couverture suffisante de la carte ionosphérique au-delà de votre position pour que les corrections ionosphériques se rendent à tous les satellites.
Pour améliorer les renseignements fournis par le SBAS, le GNSS Arrow possède la capacité unique d’extrapoler l’information ionosphérique au-delà de la grille d’émission. Cette fonction élargit la zone de couverture géographique utilisable du système SBAS.
Renseignements sur le signal
Un SBAS transmet les données de correction sur la même fréquence qu’un GPS à partir d’un satellite géostationnaire (segment spatial), permettant l’utilisation du même récepteur utilisé pour la fonction GPS. Un autre avantage à cette transmission du SBAS sur la même fréquence est qu’une seule antenne est nécessaire.
Réception
Comme le SBAS transmet dans la bande L, le signal nécessite une ligne de vue tout comme le GPS afin de maintenir l’acquisition. Choisissons par exemple le WAAS. Actuellement, deux satellites de communication transmettent des données WAAS à usage public. Étant donné leur emplacement, ces satellites peuvent paraître bas à l’horizon, selon votre position géographique sur terre. Dans les régions où les satellites semblent bas à l’horizon, ils sont plus facilement cachés par le terrain, les arbres, les immeubles ou autres objets, ce qui peut résulter en une perte de signal. Plus vous êtes loin de l’équateur et de la longitude du satellite, plus le satellite semblera bas à l’horizon. Heureusement, la technologie COAST atténue ce problème en maintenant la performance du système pendant une perte de signal assez prolongée du SBAS.
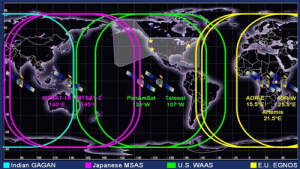
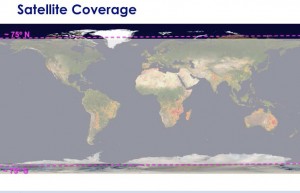
Couverture globale du SBAS
La figure ci-dessous illustre la couverture globale actuelle du SBAS. Cette figure présente une couverture approximative du signal pour chaque constellation SBAS. Bien qu’il y ait une couverture géographique à des altitudes plus élevées, l’utilisation pratique du SBAS se limite aux environnements où une ligne de vue relativement constante des satellites par le système GNSS Arrow est disponible.
Couverture globale du SBAS
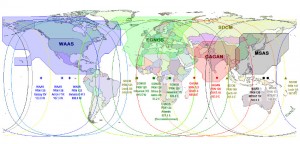
La carte ci-dessous illustre la couverture ionosphérique de chaque constellation SBAS. Pour WAAS, EGNOS et MSAS, les grilles illustrées sont les grilles réelles, sans extrapolation. La grille montrée pour GAGAN a été enregistrée par un GNSS Arrow pendant la phase finale de l’essai d’acceptation et n’est donc pas la grille officielle des autorités indiennes.
Extrapolation de la carte ionosphérique SBAS
Afin d’améliorer la carte ionosphérique fournie par le SBAS, les récepteurs GNSS Arrow extrapolent une carte ionosphérique plus étendue que celle émise, élargissant ainsi sa couverture efficace. Ceci permet d’utiliser avec succès le GNSS Arrow dans les régions où les produits concurrents ne peuvent fonctionner. Par exemple, l’extrapolation améliore la couverture du secteur nord de l’Amérique du Sud pour les signaux WAAS, et de la partie nord de l’Afrique pour les signaux EGNOS, etc.
Il est à noter que le processus d’estimation des corrections ionosphériques au-delà de l’émission du SBAS ne sera pas aussi précis que si la carte SBAS était elle-même plus étendue. Cette différence peut causer une dégradation mineure de la précision. La figure ci-dessous illustre l’émission ionosphérique réelle des signaux WAAS et EGNOS, ainsi que la version extrapolée. Comme on peut le voir, la grille extrapolée s’étend plus loin que l’émission réelle dans toutes les directions, améliorant la couverture efficace.
Traitement des erreurs – Différences entre LBAS et SBAS
Outre l’affaiblissement de la précision et les trajets multiples (erreurs qui ne peuvent pas être résolues par une correction différentielle), de nombreux facteurs peuvent affecter la précision du positionnement auquel on peut s’attendre d’un système DGPS. Les plus importantes de ces influences comprennent :
Distance entre l’utilisateur distant et la station de référence (erreurs atmosphériques et d’orbite)
De quand datent les corrections différentielles reçues
Conditions atmosphériques à la position de la station de base et de l’utilisateur distant
Qualité du récepteur GPS utilisé à la station de référence et aux stations distantes
Proximité de la station de référence
Dans un LBAS, la distance entre l’utilisateur distant et la station de référence peut parfois être considérable, notamment si des radiophares DGPS de 300 kHz sont utilisés. Par conséquent, certaines erreurs associées au GPS de la station de référence diffèrent quelque peu de celles associées à l’emplacement distant. Cette décorrélation spatiale des erreurs peut causer un déport du positionnement relatif par rapport aux coordonnées absolues du récepteur distant. Ce déport peut atteindre un mètre par 100 km (62 milles) de distance entre la station de référence et le récepteur distant.
Les causes de décorrélation sont :
• Erreurs d’orbite du satellite GPS (importantes)
• Erreurs ionosphériques (peuvent être plus importantes selon le niveau d’activité)
• Erreurs troposphériques (moins importantes)
Les erreurs d’orbite du satellite GPS sont habituellement plus graves dans le cas de systèmes différentiels locaux comme des radiophares. L’effet de décorrélation est tel que l’erreur d’orbite du satellite se projette différemment sur les mesures de portée du récepteur de référence et du récepteur distant. À mesure que la distance séparant les récepteurs augmente, l’erreur d’orbite ne se projette pas de la même façon sur les portées, et le processus de différentiation de mesure ne l’annulera pas complètement. Les réseaux SBAS, qui utilisent plusieurs stations de référence, peuvent calculer plus précisément le vecteur d’orbite de chaque satellite. Le correcteur qui en résulte est géographiquement indépendant, de sorte qu’une très faible décorrélation se produit en ce qui a trait au positionnement dans le réseau.
L’ionosphère et la troposphère causent toutes deux des erreurs de mesure dans les signaux reçus par le GPS. La troposphère est la portion humide de l’atmosphère, la plus près du sol. À cause de l’humidité, la réfraction des signaux GPS à plus faible altitude peut causer une distorsion des mesures des satellites. La source d’erreur est facilement modelée à l’intérieur du récepteur GPS et ne présente pas de problème grave.
L’erreur causée par l’ionosphère est plus importante, cependant, et n’est pas facile à corriger. L’ionosphère est la couche chargée de l’atmosphère responsable de l’aurore boréale. Des particules chargées provenant du soleil ionisent cette portion de l’atmosphère, résultant en une couche atmosphérique électriquement active. Cette activité électrique nuit aux signaux GPS qui pénètrent cette couche, affectant les portées mesurées. Ce qui rend difficile l’élimination de l’effet de l’ionosphère est qu’il varie chaque jour, et même d’heure en heure, à cause du cycle solaire de 11 années et de la rotation de la terre. Au cours de l’été 2001, le cycle solaire atteignait son point le plus haut des 11 années, et on notait un refroidissement graduel de l’ionosphère dans les années qui ont suivi, accompagné d’une activité ionosphérique plus réduite. L’élimination de l’effet ionosphérique dépend de l’architecture du réseau différentiel. Les radiophares DGPS, par exemple, utilisent une approche plus conventionnelle que le WAAS ou le SBAS en général. Les radiophares DGPS utilisent une seule station de référence, qui fournit des corrections d’erreur GPS en temps réel basées sur des mesures effectuées à son emplacement. Il est possible que l’état de l’ionosphère soit différent à la position de l’utilisateur distant et à celle de l’unique station de référence. Ceci peut produire une source d’erreur qui n’est pas entièrement corrigée et qui risque de dégrader la précision du positionnement, plus la distance est grande entre la station de référence et l’utilisateur distant.
Les systèmes SBAS (WAAS, EGNOS, MSAS, GAGAN, etc.) utilisent une approche différente, se servant plutôt d’un réseau de stations de référence dans des endroits stratégiques pour prendre des mesures et modeler l’ionosphère en temps réel. Les mises à jour de la carte ionosphérique sont envoyées en continu afin de corriger la position de l’utilisateur à mesure que l’ionosphère change. Comparativement à l’utilisation d’un radiophare DGPS, l’effet de la proximité géographique à une seule station de référence est minimisé, ce qui résulte en une performance plus cohérente du système dans tous les emplacements du réseau.
Retard des corrections
Le délai des corrections différentielles affecte à un degré moindre la précision du positionnement du récepteur distant puisque la magnitude du SA a été ramenée à zéro en 2000. Les retards dépendent de ce qui suit :
Le temps nécessaire à la station de référence pour calculer les corrections
Le débit de la liaison radio
Le temps nécessaire au signal pour atteindre l’utilisateur
Le temps requis par le récepteur différentiel distant pour démoduler le signal et le communiquer au récepteur GPS.
Toute perte de données lors de problèmes de réception
La plupart de ces délais exigent moins d’une seconde, quoique dans certains cas, en fonction de la quantité d’information transmise, un délai total de trois à cinq secondes peut se produire. L’effet de ces délais est mitigé par la technologie COAST incorporée dans les GPS Arrow. Cette technologie est particulièrement utile lors de la perte de signal DGPS lorsque l’âge des corrections augmente à chaque seconde de perte de signal.
Qualité du récepteur GPS
La qualité du récepteur GPS influence dramatiquement la précision du positionnement. Les GPS bas de gamme, comme les nombreux récepteurs portatifs ou fixes abordables, ont habituellement une précision horizontale de 3 à 10 mètres dans 95 % des cas. La précision d’un produit donné dépend des caractéristiques de performance du récepteur en question. Les récepteurs GPS plus précis peuvent atteindre une précision horizontale submétrique dans 95 % des cas en utilisant des transmissions DGPS en temps réel. La gamme de GPS Arrow se situe dans cette dernière catégorie.[/vc_column_text][/vc_tta_section][vc_tta_section title= »Atlas » tab_id= »1454345544434-9fff87e0-ce44″][vc_column_text]AtlasTM est un service multi-constellations différentiel étendu qui utilise des techniques de diffusion par satellite. Il Permet d’obtenir une correction différentielle GNSS dans le monde entier et en corrigeant toutes les constellations (GPS, Beidou, Glonass, Galileo -futures versions-) dans un format fait à façon pour la précision requise.
Fonctionnement
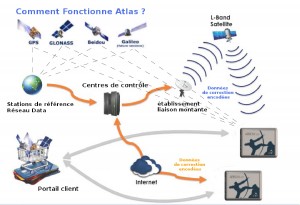
![]() Le service AtlasTM génère des corrections dans votre récepteur GNSS optimisé pour la position de l’utilisateur. Les EOS supportant le service Atlas émettent à la fois des corrections RTCM-104 de haute qualité pour utilisation externe, et des données corrigées différentiellement sur la latitude, la longitude et l’altitude en format NMEA. La figure ci-dessous illustre le fonctionnement du système.
Le service AtlasTM génère des corrections dans votre récepteur GNSS optimisé pour la position de l’utilisateur. Les EOS supportant le service Atlas émettent à la fois des corrections RTCM-104 de haute qualité pour utilisation externe, et des données corrigées différentiellement sur la latitude, la longitude et l’altitude en format NMEA. La figure ci-dessous illustre le fonctionnement du système.
• Satellites GPS
• Multiples stations de référence• Envoi de corrections GPS par réseau de communication terrestre au
• Centre de contrôle du réseau, où les corrections de données sont vérifiées et préparées pour envoi par liaison montante au
• Satellite géostationnaire de la bande L
• Couverture typique du satellite géostationnaire de la bande L.
• Données de corrections reçues et appliquées en temps réel
Plusieurs services sont disponibles :
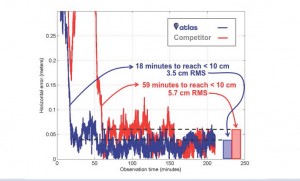
• Service H10 : précision à 4-5 cm RMS (8 cm 2DRMS – 95 %)
• Service H30 : précision à 30 cm RMS (15 cm 2DRMS)
• Service H100 : précision sub-métrique, 50 cm RMS (1m 2DRMS)
Les abonnements peuvent être pris au mois , à l’année, comme souhaité.[/vc_column_text][/vc_tta_section][vc_tta_section title= »Les Datums » tab_id= »1454345555814-c89239e9-cf4c »][vc_column_text]Quand on demande « quel est le cadre de référence utilisé par le GPS? »,la réponse est inévitablement : « WGS 84 ». Mais si on demande quelle version du WGS 84, la réponse n’est pas aussi évidente. En outre, GPS, SBAS (WAAS, EGNOS, MSAS, GAGAN, etc.), Omnistar, radiophare, station de référence locale, etc., utilisent tous des datums ou des cadres de référence différents. Il est très important de comprendre les différences entre les diverses implémentations au sein d’un datum spécifique, et de s’assurer que les cartes et les données GPS sont de la même version que le datum utilisé.
GPS et historique de l’évolution du WGS 84

(La version anglaise du texte en italiques provient de la source NGS suivante : http://www.ngs.noaa.gov/faq.shtml#WGS84)
Le WGS 84 (ou SGM 84) est le Système géodésique mondial de 1984. Il s’agit du cadre de référence utilisé par le Department of Defence (DoD) des États-Unis et est défini par la National Geospatial-Intelligence Agency(NGA) (auparavant National Imagery and Mapping Agency) (auparavant Defence Mapping Agency). Le DoD utilise le WGS 84 pour tous ses besoins de positionnement, cartographie, navigation et arpentage, y compris les orbites de « diffusion » et les orbites « précises » de son GPS. Le WGS 84 a été défini en janvier 1987 à l’aide de techniques Doppler de topographie par satellite. Il a servi de cadre de référence pour l’émission des éphémérides (orbites) à compter du 23 janvier 1987.
Cette version initiale du WGS 84 est appelée le WGS 84 (original).
À 0000 GMT le 2 janvier 1994, la précision du WGS 84 était mise à niveau grâce aux mesures GPS. Le nom officiel devenait alors WGS 84 (G730) puisque la date de mise à niveau coïncidait avec le début de la semaine 730 du GPS. Il est devenu le cadre de référence des orbites de diffusion le 28 juin 1994.
À 0000 GMT le 30 septembre 1996 (début de la semaine 873 du GPS), le WGS 84 était à nouveau redéfini et aligné plus précisément sur le Repère international de référence terrestre (ITRF) 94 du Service international de la rotation terrestre (IERS). Il a alors été appelé WGS 84 (G873). Le WGS 84 (G873) était adopté comme cadre de référence pour les orbites de diffusion le 29 janvier 1997.
Le 20 janvier 2002, la plus récente réalisation du WGS 84, appelée WGS 84 (G1150) était adoptée et est la version actuelle. Cette réalisation est basée sur l’ITRF 2000. Entre la première implémentation du WGS 84 (original) et la révision actuelle, il peut y avoir des différences de 1 à 2 mètres. En Amérique du Nord, on peut utiliser l’outil de transformation en ligne des datums
La section suivante explique pourquoi il y a eu changement de cadre de référence pour les orbites GPS.
GPS et Repère international de référence terrestre (ITRF)
Les orbites GPS sont calculées à partir de données recueillies par un réseau global de récepteurs coordonnés par le Service international de GPS pour la géodynamique (IGS). La précision des orbites GPS dépend de plusieurs facteurs, notamment la précision des coordonnées des sites de cueillette de données. La surface du globe n’est pas lisse et rigide comme une coquille d’œuf. Elle est faite de plusieurs sections, ou plaques, qui se déplacent lentement dans des directions et à des vitesses différentes dans un processus appelé mouvement crustal. Les scientifiques étudient ces mouvements pour plusieurs raisons. Notamment, ils souhaitent savoir où se trouvent les masses terrestres l’une par rapport à l’autre, et où elles se dirigent. Comme les sites IGS se situent sur ces plaques de lithosphère, nous devons pouvoir évaluer où les sites se trouvent lorsque les données sont recueillies.
Le Service international de la rotation terrestre (IERS) calcule périodiquement les positions des sites à une date donnée. Les sites définissent l’IERS, le Repère international de référence terrestre (ITRF), et la date définit l’époque. L’IERS calcule également les mouvements (ou la vélocité) des sites afin d’établir avec une certaine précision où ils se situeront dans un avenir « rapproché ». L’IRTF est une norme acceptée à l’échelle internationale, et présente le système de référence géocentrique le plus précis disponible actuellement. Plus la durée d’opération des sites est longue, meilleure est l’estimation de leur position et de leur vélocité, et plus les orbites sont précises.
Le GPS et le SBAS sont tous les deux basés sur le cadre de référence ITRF 2000, avec la différence suivante :
Le GPS a fixé l’époque à janvier 2002 (en d’autres termes, pour le GPS, le mouvement crustal de la terre s’est arrêté depuis 2002 et ce jusqu’à la prochaine révision)
Le SBAS (WAAS, EGNOS, MSAS, etc.), par contre, recalcule l’emplacement des stations terriennes régulièrement (presque chaque année) et prédit (ou projette) leur vélocité future pour quelques mois ou jusqu’au milieu de l’année suivante.
Coordonnées GPS et datum de carte
Lorsqu’un récepteur GPS est utilisé en mode autonome (sans correction différentielle), les coordonnées émises sont en WGS 84 (G1150), le cadre de référence GPS actuel. Lorsqu’on utilise les corrections différentielles suivantes :
Du SBAS : les coordonnées émises par un récepteur GPS sont en ITRF 2008 (époque actuelle)
Du Atlas : les coordonnées émises par un récepteur GPS sont en ITRF 2008 (époque actuelle)
Une station de référence locale (en temps réel ou avec post-traitement) : le mobile suivra le datum des coordonnées utilisées par la station de référence
Post-traitement en ligne du PPP (precise point positioning) canadien : choix de Nad83 (CSRS98) ou ITRF 2008
Les datums locaux ont aussi évolué ailleurs dans le monde. Par exemple aux États-Unis, le NAD 83 (North American Datum of 1983) était originalement équivalent au WGS 84. Depuis, il a suivi son propre cheminement et a maintenant divers qualificatifs NAD 83 (CORS 96) ou HARN. Le Canada a aussi migré du NAD 83 (original) au NAD 83 (CSRS 98)
http://www.geod.nrcan.gc.ca/publications/papers/abs6_e.php
Heureusement, les révisions récentes des datums locaux sont liées à une révision ITRF, permettant ainsi l’utilisation de 6, 7 ou 14 transformations de paramètres. Il importe de s’assurer que le logiciel de collecte de données sur le terrain ou le logiciel SIG/topographique au bureau supporte les différentes révisions du datum et que les paramètres de transformation sont à jour.
Références utiles sur le datum
Repère international de référence terrestre :
http://itrf.ensg.ign.fr/
Service international de la rotation terrestre et systèmes de référence :
http://www.iers.org/
Canada
Système canadien de référence spatial (Ressources naturelles Canada) :
http://www.geod.nrcan.gc.ca/index_e.php
Outil de transformation en ligne TRNobs de Ressources naturelles Canada :
http://www.geod.nrcan.gc.ca/tools-outils/
(fournit les paramètres de transformation utilisés)
Article – Réalisation et unification du NAD83 au Canada et aux États-Unis grâce à l’TRF :
http://www.geod.nrcan.gc.ca/publications/papers/abs6_e.php
États-Unis
Positionnement horizontal en fonction du temps, outil de transformation NGS en ligne :
http://www.ngs.noaa.gov/cgi-bin/HTDP/
Article – Transformation des positionnements et vélocités entre le Repère international de référence terrestre (ITRF) 2000 et le Datum nord-américain de 1983 (NAD 83) :
http://www.ngs.noaa.gov/CORS/Articles/SolerSnayASCE.pdf
Liste d’articles du site Web NGS :
http://www.ngs.noaa.gov/CORS/Articles/[/vc_column_text][/vc_tta_section][vc_tta_section title= »Fonctionnement en SBAS » tab_id= »1454345567560-4023600f-7217″][vc_column_text]Les avantages d’un système modulaire
L’utilisation du SBAS (Satellite Based Augmentation System) pour des corrections différentielles temps réel est devenue commune depuis que la couverture et la fiabilité du système ont étés validées. Pour une meilleure compréhension du SBAS (WAAS, EGNOS, MSAS, etc.) ou pour le service omnistar, regardez SVP « comprendre le SBAS »
Tous les GPS vendus sur le marché sont normalement SBAS compatible. Mais le récepteur Eos Arrow est développé spécifiquement pour des performances améliorées dans le système GPS/SBAS pour l’industrie et les applications SIG, cela à un tarif très concurrentiel.
Qu’est ce qui fait la différence? Pourquoi la série Arrow d’Eos Système de Positionnement est elle unique ?
![]() Ces récepteurs utilisent le SBAS à son plein potentiel et comme source unique de correction différentielle pour une journée DGNSS . Nous vous invitons à lire ci-dessous les avantages clés de ce récepteur révolutionnaire :
Ces récepteurs utilisent le SBAS à son plein potentiel et comme source unique de correction différentielle pour une journée DGNSS . Nous vous invitons à lire ci-dessous les avantages clés de ce récepteur révolutionnaire :
– Une solution sub-métrique à centimétrique sans post traitement
– Une précision et une performance inégalée avec le SBAS
– Une précision et une performance inigalée dans le monde entier Grâce à AtlasTM.
– Un système modulaire très souple
– Des options pour une plus grande précision
– Un prix ‘low cost’ pour son acquisition et sa maintenance
– Utilsation de GPS, Glonass, Beidou et Galileo (réservé)
Une solution Sub métrique sans post traitement
Pourquoi les Eos Arrow ne nécessitent pas de post traitement ?
Leur force est la capacité à maintenir une position DGNSS quand le signal SBAS (WAAS, EGNOS, MSAS, et compatible, Atlas) est gêné pour toute sorte d’obstruction (forte canopée). Les signaux SBAS sont de la même nature que les signaux GPS (c’est la raison pour laquelle l’antenne GPS reçoit parallèlement les signaux GPS et SBAS), et donc, sujets aux mêmes types d’obstruction. Le problème est très simple :
Quand il n’y a pas de signal différentiel, il n’y a pas de de DGNSS … Toutefois, le Arrow est capable de maintenir une précision sub métrique pendant environ 40 minutes après la perte du signal corrigé.
Ils ne collectent pas uniquement l’âge limite de la correction différentielle d’entrée, mais il anticipe et prédit, à travers des algorithmes sophistiqués, brevetés et démontrés sur le terrain, comment les conditions ionosphériques, l’heure GPS et les éphémérides évoluent avec le temps. Cette technologie propriétaire permet de ne pas perdre de temps avec le post traitement!
De plus, le Eos Arrow n’offre pas uniquement deux canaux SBAS dédiés, de haute sensibilité, mais utilise également des satellites du SBAS pour sa position (c’est à dire comme ‘extra satellite’)
Avec le Eos Arrow, vous êtes libres de relever en temps réel tout le temps !
Est-ce que cette technologie fonctionne également en foresterie ?
![]()
Absolument et c’est ce qui fait la réputation du EOS Arrow grâce à sa réception inégalée sous les arbres. Vous n’aurez pas une précision sub métrique toute la journée, mais vous aurez une solution DGPS toute la journée sans post traitement. Le Arrow, avec sa capacité temps réel accrue, a prouvé être , si ce n’est meilleure, en tous les cas équivalent aux autres récepteurs du marché, qui ont besoins d’un signal post traité.
Le récepteur DGNSS … il travaille là ou vous travaillez !
Est-ce que cette technologie accepte une autre source de correction différentielle ?
Oui, c’est sa force.
Les Eos Arrow peuvent fonctionner en DGPS, DGNSS, RTK, ce partout dans le monde.
Est-ce que le post traitement submétrique est plus précis que le temps réel ?
Non, pas dans le cas du récepteur des Arrow. Pour un travail de qualité submétrique, utilisant un lissage sur la phase, la précision des Arrow en temps réel avec le SBAS sera équivalente aux meilleurs récepteurs post traités du marché.
Dans des environnements libres de tout multi trajets, les méthodes de post traitement sur la phase avec une résolution d’ambiguïté flottante ou fixée donnera des résultats compris entre 15 cm et quelques millimètres. Dans ces cas de figure, le recueil de données sera différent du ‘submétrique’ et nécessite une initialisation et un temps pour le recueil plus long ainsi qu’un logiciel spécifique pour un pst traitement sur la phase. pour de telles solutions, regardez s.v.p à la section suivante …
Une précision et des performances inégalées avec le SBAS.
![]()
Parce que les professionnels ont besoin d’une précision sur laquelle ils peuvent compter, EOS a développé la série des Arrow pour obtenir une précision de 60 cm avec les signaux gratuits du WAAS, EGNOS, MSAS et pour les signaux compatibles, ainsi que les services Atlas.
Cette précision est exprimée en 2DRMS ( 95 % des points dans ces valeurs de précision)
En HRMS ou RMS (l’écart moyen du nuage de points avec 67 % en moyenne), l’équivalent est de 30 cm RMS .
En CEP (Circular Error Probable, 50 % des cas), le EOS Arrow a alors une précision de 25 cm.
Et oui … en utilisant le signal SBAS seul !
Si vous n’êtes pas convaincu, nous vous donnons RDV et nous vous aiderons dans vos démarches.
Est ce que le SBAS est précis et fiable ?
Le SBAS est tout a fait précis (par exemple, voir le dernier rapport du Centre Technique de l’administration d’aviation fédérale http://www.nstb.tc.faa.gov/ ), mais ce qui rend votre position exacte est comment le Eos Arrow manipule et traite le signal de SBAS.
Les récepteurs Eos Arrow ont été conçus pour manipuler les signaux du SBAS au plein potentiel, comme la seule source nécessaire de correction différentielle, avec des méthodes très innovantes et uniques pour fournir ainsi des corrections différentielles en permanence.
La fiabilité des corrections du SBAS (WAAS, EGNOS, MSAS et compatibles) a été conçue
essentiellement pour l’aviation ou la précision d’approche est primordiale. En clair, dans un avion, nos vies dépendront de ces signaux de SBAS. L’intégrité d’un tel système est bien supérieure à toute autre source de signal différentielle.
Où puis-je recevoir cette exactitude ?
Un système modulaire
Qui a dit qu’un système de cartographie GPS « deux pièces » est mieux qu’une solution d’un tout-en-un ?
Ces récepteurs de cernière génération le font et le marché le prouve !
Quand les premiers récepteurs Bluetooth submétriques sont arrivés au monde sur le marché en 2003, les utilisateurs ont été libérés des contraintes et des prix des systèmes GPS intégrés. Pour la première fois, les utilisateurs pouvaient construire leur propre système de collecte de données GPS basé sur leurs besoins spécifiques, leurs exigences et leur budget.
Un système GPS modulaire vous permet de vous adapter aux plates-formes informatiques de collecte de données rapidement changeantes. Les ordinateurs de terrain ont évolués aussi vite que l’ordinateur de bureau avec les mêmes avantages et les mêmes inconvénients .
Du côté des processeurs, la plupart des PDA haut de gamme sont cadencés à 800 Mhz par rapport aux quelques mégaoctets initiaux. Nous avons vu des nouveaux logiciels ne supportant plus des systèmes d’exploitation/processeurs trop vieux et oui, nous avons vu des clients bloqués sur des machines tout intégrées obsolètes de plusieurs milliers de dollars et inutilisables avec leur nouveau logiciel.
… une protection de votre investissement à long terme!
Les vieux jours pour les systèmes d’exploitation propriétaires et de collectes de données terrain avec leurs logiciels de post-traitement sont maintenant avec le Arrow GNSS dépassés. Ainsi ce que la plupart des personnes voient, malheureusement, comme un avantage dans un récepteur GPS tout-intégré est effectivement un énorme inconvénient, en limitant l’investissement total à, au plus, deux ou trois années.
En fait, le seul avantage pourrait être dans le body building … de plus grands biceps et triceps pour
l’équipe de terrain!
Mon récepteur sera-t-il compatible avec mon ordinateur ou mon logiciel de collecte de données ?
La réponse est oui !
Vous pouvez passer de Android à iOS, travailler dans les environnements windows !
Avec le port Bluetooth, tous les récepteurs se connecteront sans difficulté à votre terminal !
Construisez votre propre système de collecte de données GPS indépendamment de tout solution informatique …
et libérez-vous!
Options pour une meilleure précision.
Quand mieux que du sub-20cm ou quand un niveau du centimètrique est exigé, de plus hautes options d’exactitude sont disponibles pour l’un ou l’autre en temps réel ou en post-traitement .
Les deux méthodes exigent une configuration LBAS (Local Based Augmentation System) avec pivot et rover pour des solutions fixées ou flottantes.
Nous vous invitons à visiter notre page produit pour plus de renseignements sur les configurations disponibles.
Système bon marché
La gamme de récepteur est disponible à une portion des prix pour une solution GNSS décimétrique à centimétrique.
. Les avantages économiques supplémentaires incluent :
Prix Inférieur au fonctionnement : aucun logiciel de post-traitement supplémentaire n’est exigé pour le travail sub métrique en temps réel.
Prix d’opération le plus bas : éliminez des heures/années passées en post-traitant et un entretien de logiciel de post-traitement annuel cher!
La liaison directe à votre système SIG/CAD existant et au flux de production.[/vc_column_text][/vc_tta_section][/vc_tta_tabs][/vc_column][/vc_row]